
Keep up to date with our innovative initiatives.
Sign up here
Started at: 01-11-2018
Ends on: 31-10-2021
Budget: € 17.133.450,41
Areas: 5G & IoT - Software Networks
The possibility of providing connected, cooperative and automated mobility (CCAM) services along different countries when vehicles traverse various national borders has a huge innovative business potential. However, the seamless provision of connectivity and the uninterrupted delivery of services along borders also poses interesting technical challenges. The situation is particularly challenging given the multi-country, multi-operator, multi-telco-vendor, and multi-vehicle-OEM scenario of any cross-border layout.
Motivated by this, 5GCroCo brings together a strong consortium from both, European automotive and mobile communications industries, with the explicit support of road traffic authorities and the respective national governments (through letters of support), to develop innovation at the intersection of these two industrial sectors. The aim is to define a successful path towards the provision of CCAM services along cross-border scenarios and reduce the uncertainties of a real 5G cross-border deployment. 5GCroCo aims at trialling 5G technologies in the cross-border corridor connecting the cities of Metz-Merzig-Luxembourg, traversing the borders between France, Germany and Luxembourg.
The objective is to validate advanced 5G features, such as New Radio, MEC-enabled distributed computing, Predictive QoS, Network Slicing, and improved positioning systems, all combined together, to enable innovative use cases for CCAM. 5GCroCo aims at defining new business models that can be built on top of this unprecedented connectivity and service provisioning capacity, also ensuring that relevant standardization bodies from the two involved industries are impacted.
i2CAT’s role in the project is focused on the management and orchestration of the RAN and MEC infrastructure located in the 22@ district of Barcelona, taking advantage of the neutral hosting platform developed in 5G City to demonstrate one of the trials related to the Anticipated Cooperative Collision Avoidance (ACCA) use case.
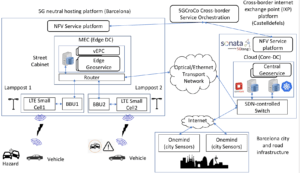
In addition, i2CAT leads the task about Precise Positioning, which has the main objective of designing and validating innovations to deliver cm-level positioning supported by the 5G network. In particular, i2CAT is working on the enhancement of its Ultra-Wideband (UWB) based positioning solution, adapting it to the requirements of the ACCA use case.


















This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 825050.


